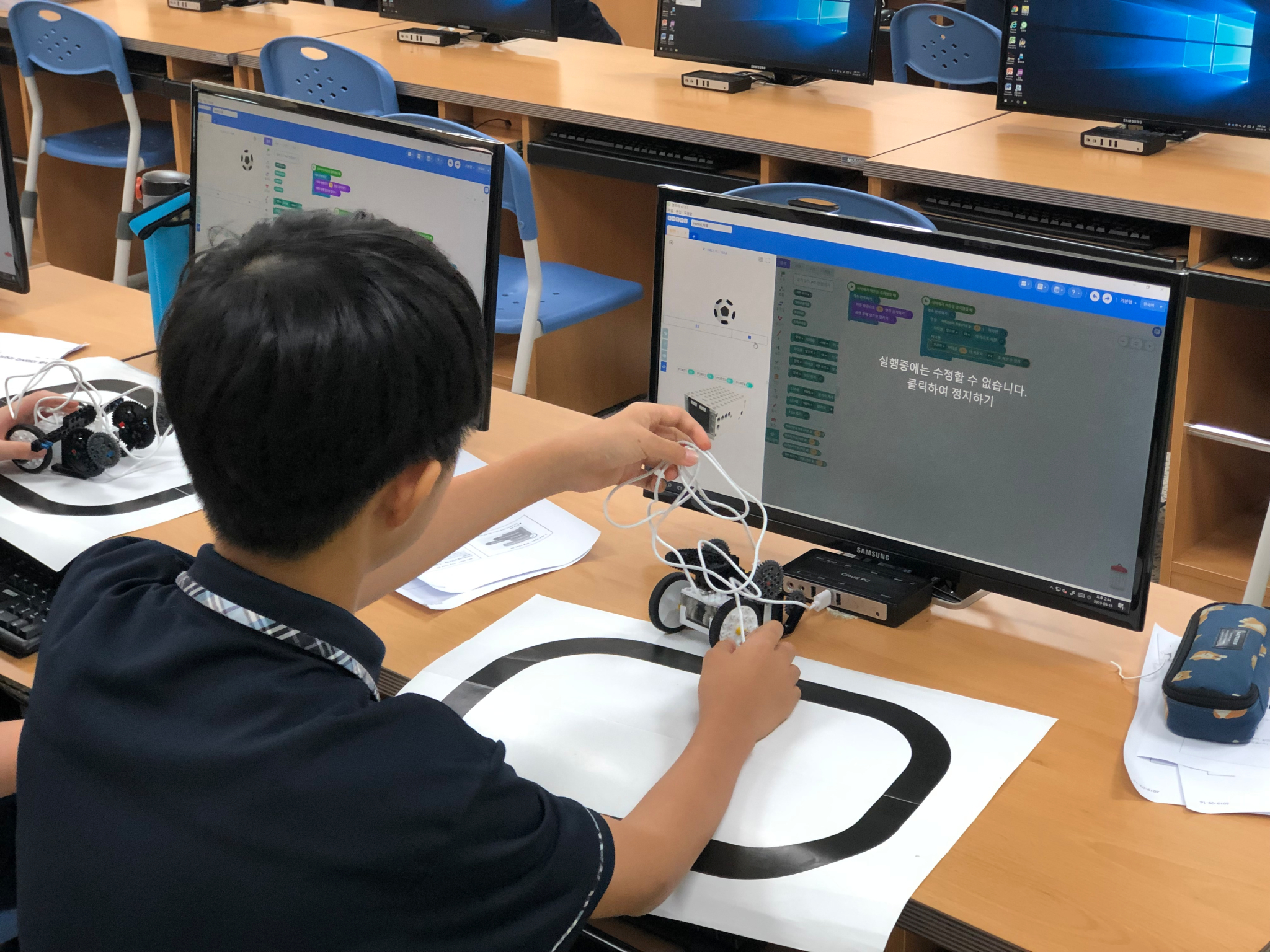
앞에서 배운 엔트리 코딩 실습 내용을 바탕으로 피지컬 컴퓨팅 실습을 진행하였습니다.
적외선 센서를 이용하여 로봇이 검정색과 흰색을 구분하고 값을 입력받아 검정색 선을 넘지 않도록 코딩하였습니다.